La correlación del fondo marino en alta resolución requiere que vehículos submarinos realicen estudios volando a bajas altitudes, especialmente cuando se adquieren imágenes ópticas. Para optimizar el uso de recursos y tiempo de prospección, este proyecto busca dar un salto al nivel de autonomía de los vehículos submarinos autónomos (AUV) de investigación y comerciales más allá de las prácticas actuales. Los AUV ahora ejecutan misiones planificadas previamente o, en el mejor de los casos, implementan eventos preprogramados y, por tanto, reaccionan durante las encuestas con un leve nivel de reparametrización.
Para dotar a los robots submarinos de mayor autonomía y capacidades, este proyecto busca mejorar y potenciar sus capacidades cognitivas e inteligentes durante la exploración del fondo marino. Identificamos dos desarrollos innovadores: (A) mapeo inteligente de grandes áreas del fondo marino, que ahora es una tarea que requiere mucho tiempo; y (B) mapeo inteligente de estructuras tridimensionales complejas (ahora limitado a pilotos humanos y, a menudo, imposible de realizar). Ambos desarrollos requieren nuevos enfoques que permitan a los robots realizar levantamientos adaptativos de forma autónoma. En el primer caso, buscamos que el robot identifique los objetivos de interés y adapte el levantamiento para optimizar significativamente los tiempos de levantamiento, excluyendo levantamientos innecesarios de áreas no interesantes.
SIREC probará este primer caso de uso en el mapeo de praderas marinas de Posidonia oceánica, un componente importante de los ecosistemas vinculados al secuestro de carbono y, por tanto, de gran impacto ambiental y social. En el segundo caso, dotaremos al robot de inteligencia para inspeccionar estructuras complejas a corta distancia (<5 m), con la posibilidad de identificar áreas que requieran remapeo, considerando en todo momento la seguridad del vehículo. Este modo de navegación inteligente tiene aplicaciones en numerosos campos (geología, arqueología, ingeniería, infraestructuras energéticas, etc.). Desarrollaremos esta inteligencia de navegación utilizando objetivos geológicos (afloramientos rocosos submarinos y chimeneas de respiradores hidrotermales para estudios tectónicos e hidrotermales respectivamente).
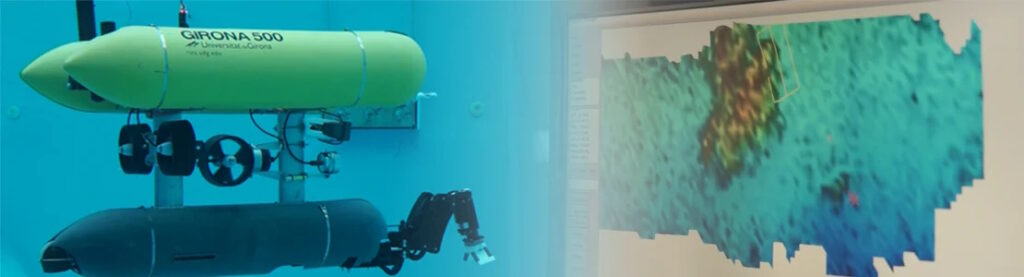
SIREC aborda estas dos necesidades mediante dos casos de uso independientes pero relacionados utilizando el Girona 500 AUV. Prevemos que los algoritmos desarrollados tendrán aplicación en diversos campos científicos (biología, geología, estudios medioambientales), y los explotaremos como vector de difusión al público en general, y para explorar formas de acercar el trabajo de campo y el fondo marino a las aulas. Estos algoritmos se verificarán tanto en el tanque de agua del Centro de Robótica Subacuática (CIRS) como en extensas pruebas de campo. Los algoritmos entrenados se optimizarán para ejecutarse en el hardware integrado, permitiendo así la ejecución en tiempo real para apoyar el comportamiento del robot autónomo. Durante el proyecto, se generarán datos de capacitación completos y tanto los algoritmos como los datos estarán disponibles públicamente a través de repositorios online.
Participación:
El grupo de investigación de macrófitos acuáticos del CEAB-CSIC (GAME) colabora con la Universidad de Girona (UdG) organizando viajes de campo para verificar la coincidencia de las «decisiones visuales» tomadas por el robot y la naturaleza real del fondo marino estudiado . Las tipologías de fondo marino abarcan praderas, alfombras muertas, arena y rocas.
Coordinación del proyecto: UdG, Dr. Rafael Garcia